
Yes, I’m a glutton for punishment. Over the short flying life of my Sportsman, it has been subjected to more than its fair share of tweaks and modifications, mainly to the avionics. (As you all know, the basic airframe is good, solid, hard to improve on, and I’ve been purposely conservative ahead of the firewall: The Barrett IO-390 is unmodified from the day it was built, and hasn’t missed a beat in 400 hours.)
I was an early adopter with the “big-screen” Dynon suite—the 7-inch-diagonal EFIS-D100 and the EMS- D120 were in from the first day, though we had to create an alternate plan in case the then-just-shipping D120 was delayed—and have been an active beta tester almost since the start.
N30KP was among several aircraft to test the new symbology that came along in V4.0 of the Dynon operating system, and is currently undergoing trials of the new autopilot that the company promised for “this summer,” but has (wisely I think) delayed until it’s actually ready to go.
The basic architecture of the Dynon system is straight- forward. You start with any of the company’s three EFIS products, the D10A, D100 or FlightDEK-D180 and add servos. The company will sell one or both servos for $750 each. At a minimum, to get a single-axis autopilot, you’ll spend $2950 (D10A and one servo). That seems like a lot until you consider that you get all the functions of the EFIS as well as the autopilot. Standalone single-axis APs are typically under $2000. Add a second servo to the Dynon system, for the another $750, and you get a lot more capability. The two-axis system using the smaller D10A is roughly comparable in price with the TruTrak DigiFlight II.
Even in its most basic form, the Dynon AP, with both servos, will fly a magnetic heading, fly a user-specified GPS track, or follow GPS flight plans. This last is the simpler, non-GPS Steering mode, which lacks turn anticipation but requires only a simple NMEA or Aviation format serial signal. These data streams are avail- able from all panel mounts likely to be installed and most handhelds. If you want GPSS, you’ll need an external ARINC-429 converter (as in the HS34 module) and the right kind of GPS to provide the data; a handheld won’t do.
The installation for the package for the GlaStar or Sportsman, so I can’t say precisely what it’ll look like or how much it will cost.
In my airplane, which had a TruTrak DigiFlight II VSGV already installed, the swap was relatively straightforward. The Dynon servos come with pigtail leads, which I terminated into a DB-9 connector to match what the TruTrak was using. On the other end of the harness, I picked up the signal, power and ground wires from the existing installation and routed them to the servos and, later, the AP74 remote AP control head—a $450 option.

In new or upgraded installations, the servos are fed on five wires: power, ground, two for the DSAB (Dynon Smart Avionics Bus) network, and a dedicated pull-to- ground disconnect. Dynon has designed the system to fail safe in that if the network should lock up, the disconnect signal goes first to the servos to get them off line; a signal is then sent back up the DSAB connection to the rest of the system, notifying it that the servos have been shut down by the pilot. In theory, you could run one set of wires to one servo then jumper over to the other servo, though I think that I’d prefer to have, at least, dedicated disconnect wires from the stick.
GlaStar and Sportsman follows the TruTrak setup. In fact, the Dynon servos have exactly the same bolt pattern, capstan size and general dimensions as the TruTrak servos. The idea was to have them drop right into existing installations but also to use the experience of other users for new installations. As this issue of the Flyer was being prepared, Dynon had not firmed up the installation
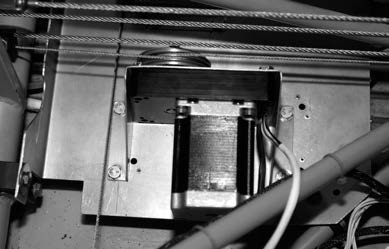
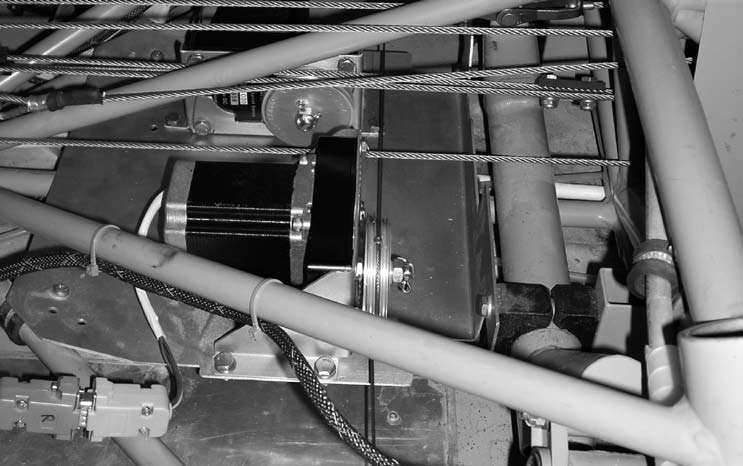
The physical installation was likewise straightforward except for the fact that the pitch servo’s capstan creates more interference with the pitch cable than the TruTrak’s. (In my airplane, the lower elevator cable just “kissed” the protecting tab on the TruTrak pitch servo. We put a piece of nylon on the tab.) I can’t explain it. Both capstans are the same diameter; it’s likely that the Dynon servo sits in the bracket slightly differently. In any case, I recommend for new installations using this plate-in-the-cage method that the plate be located as close to the cage as possible to reduce the chances of interference with the bottom elevator cable. For this installation, I moved the Dynon servo outboard slightly, which creates a very slight angle in the bridle cable from the capstan head, but there’s no evidence of chafing or increased friction. It’s better to have the capstan grooves be on axis with the elevator cable, so do what you can with new installations to be sure everything has clearance—that is, the plate is as low as it will go against the cage. If you need to space the servos up, you can always shim the mounts. (Incidentally, though Dynon does not currently use tabs to keep the bridle cable in the capstan, the techs said they’re considering them.)
In all, it took most of a day to commit the swap. With new software loaded up, I went flying. Before I begin to describe this part of the test, understand that we’re still in beta; up to B7 (beta version 7) as of this writing, with B8 (bait?) expected any day now. Also coming soon are replacement servos and AP74 module that can be updated via the DSAB; the early items were hard coded.
The first flights were a little underwhelming, to be honest; the AP flew with kid gloves, which lent a sloppy feel to the proceedings. I and many other testers reported the same thing, and a couple of versions later came new programming that made the AP much more “active” and comfortable-flying. This is good news. Dynon’s engineers reacted positively to user input and came up with useful fixes. I can’t say the Dynon system is yet up to the TruTrak’s excellent flying characteristics, but this is an utterly unfair comparison between an unreleased product and one that has had years of development and field testing behind it. I’m confident Dynon will get it right.
It has been fascinating to watch the development process at close range, and appreciate all the small decisions that have to be made to produce a worthy product. For example, the initial version of the AP had the Value knob adjusting the barometric setting on the EFIS by default. If you wanted to change the heading (HDG) or altitude (ALT) bugs, you had to press the knob first. Then, a “change field” would show up in a gray box, and you could twist to the number you wanted. However, many of us inadvertently changed the baro setting when intending to alter heading or altitude. The engineers were, at first, unsympathetic to our pleas, but eventually designed a user-configurable system that allows HDG, ALT or BARO to be the first value changed when you spin the knob, and even added the choice of making that change without first pushing the knob, or requiring that push first. It’s this kind of flexibility that makes glass so cool. As this is written, in late September, Dynon is, by my best estimate (assuming the current development pace), still 30-60 days from finalizing software and commencing delivery of the servos and AP74 module. When it ships, the system will have full altitude hold and capture (with a pitch servo, of course), heading, track- hold and GPS basic nav—useful modes for most pilots. In this version, when climbing or descending with the pitch axis active, the AP will seek a preset vertical speed, which is not really adjustable on the fly, so to speak. The next version, with the AP76 module, will add vertical-navigation track- ing, VOR/ILS coupling, and pilot-select- able vertical-speed hold. Predicted release was to be “late 2008,” but I’d bet on first quarter 2009 to be safe.



Yeah, this guy doesn’t really know what he’s doing…